
论文阅读_MASt3R-Slam
基本信息
| 项目 | 内容 |
|---|---|
| 论文标题 | MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors |
| 作者 | Riku Murai, Eric Dexheimer, Andrew J. Davison |
| 作者单位 | Imperial College London(帝国理工) |
| 时间 | 2024.6 |
| 发表会议/期刊 | |
| 全称 |
方法概览
| 特点 | 文章性质 |
|---|---|
| 输入 | 图像对 |
| 输出 | 三维信息,图像位姿 |
| 所属领域 | SLAM视觉同步定位和映射Visual simultaneous localisation and mappin |
创新点
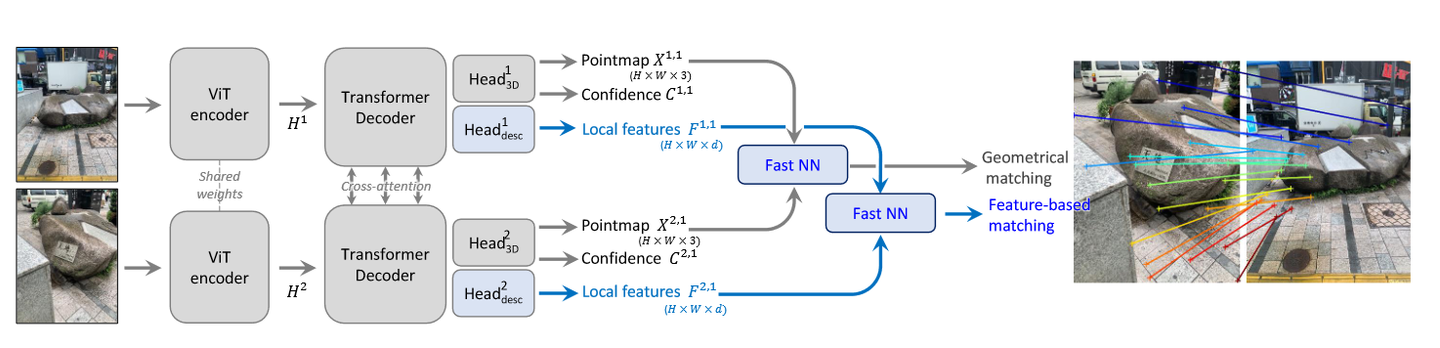
- 提出首个以双视图三维重建(其实就是MASt3R输入双视角输出视角的点图)先验MASt3R为基础的实时SLAM系统。
- SLAM领域最近的许多进展都遵循了DROID-SLAM的贡献。
- 通过最小化从相机中心到3D点的光线和当前像素查询的光线之间的角度误差来执行大规模并行匹配。
- 点图匹配、跟踪和局部融合、图构建和闭环检测以及二阶全局优化的高效技术。
- 二阶全局优化:梯度下降收敛缓慢,我们利用高斯-牛顿优化来实现有效的大规模更新。
网络架构

背景知识
匹配方法通常被归结为一个三步流程,首先提取稀疏且可重复的关键点,然后用局部不变特征描述它们,最后通过比较它们在特征空间中的距离来配对离散的关键点集。SIFT在 COLMAP等 3D 重建流程中的成功。
基于关键点的方法通过将匹配简化为关键点袋(BoK)问题,丢弃了对应任务的全局几何上下文信息。这使得它们在具有重复模式或低纹理区域的情况下特别容易出错,而这些区域实际上对于局部描述符来说是不适定的。解决此问题的一种方法是在配对步骤中引入全局优化策略,通常利用一些关于匹配的先验知识。如SuperGlue。
但是,如果关键点及其描述符尚未编码足够的信息,则在匹配过程中利用全局上下文可能为时已晚。因此,另一个方向是考虑密集的整体匹配,即完全避免关键点,并一次匹配整个图像。如LoFTR将图像视为一个整体,并且得到的对应集是密集的。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 This is a 部落格 of outbreak_sen!
 微信
微信- 支付宝

