
论文阅读_MASt3R
基本信息
| 项目 | 内容 |
|---|---|
| 论文标题 | Grounding Image Matching in 3D with MASt3R |
| 作者 | |
| 作者单位 | NAVER LABS Europe(欧洲Naver实验室) |
| 时间 | 2024.6 |
| 发表会议/期刊 | |
| 全称 |
方法概览
| 特点 | 文章性质 |
|---|---|
| 输入 | 单张 RGB 图像 |
| 输出 | |
| 所属领域 | 一个 3D 点、一个置信度值和一个局部特征。 |
创新点
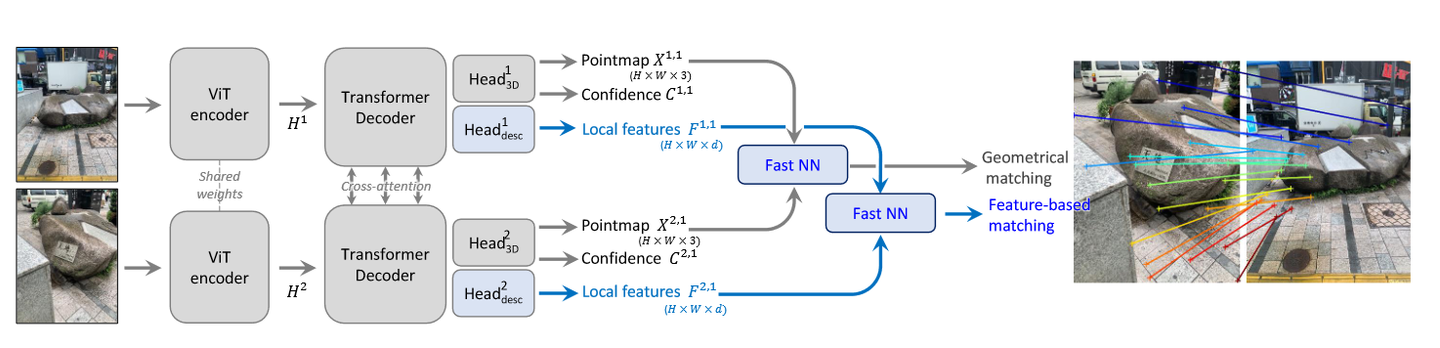
- 在 DUSt3R 前额外加一个 network 输出稠密的 local features,并添加 matching loss 来训练。最后引入一种快速相互匹配方案,能够将匹配速度提高几个数量级。
网络架构

如何匹配?

背景知识
匹配方法通常被归结为一个三步流程,首先提取稀疏且可重复的关键点,然后用局部不变特征描述它们,最后通过比较它们在特征空间中的距离来配对离散的关键点集。SIFT在 COLMAP等 3D 重建流程中的成功。
基于关键点的方法通过将匹配简化为关键点袋(BoK)问题,丢弃了对应任务的全局几何上下文信息。这使得它们在具有重复模式或低纹理区域的情况下特别容易出错,而这些区域实际上对于局部描述符来说是不适定的。解决此问题的一种方法是在配对步骤中引入全局优化策略,通常利用一些关于匹配的先验知识。如SuperGlue。
但是,如果关键点及其描述符尚未编码足够的信息,则在匹配过程中利用全局上下文可能为时已晚。因此,另一个方向是考虑密集的整体匹配,即完全避免关键点,并一次匹配整个图像。如LoFTR将图像视为一个整体,并且得到的对应集是密集的。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 This is a 部落格 of outbreak_sen!
 微信
微信- 支付宝

